Nonlinearity is natural in physical problems. In fact, the linear assumptions we make are only valid in special circumstances and usually involve some measure of “smallness”, for example, small strains, small displacements, small rotations, small changes in temperature, and so on.
We use linear approximations not because they are more correct but because
Linear solutions are easier to compute.
The computational cost is smaller.
Solutions can be superposed on each other
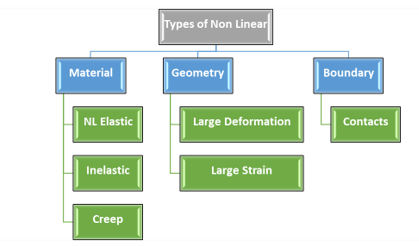
A nonlinear analysis is needed if the loading on a structure causes significant changes in stiffness. Typical reasons for stiffness to change significantly are:
⁻ Contact between two bodies
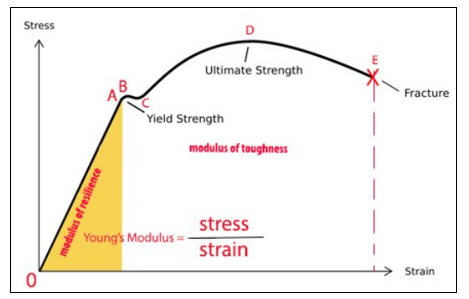
⁻ Strains beyond the elastic limit (plasticity)
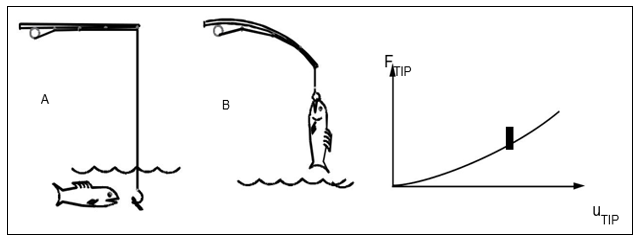
⁻ Large deflections, such as with a loaded fishing rod
However, linear analysis is not adequate and nonlinear analysis is necessary when
Designing high-performance components
Establishing the causes of failure
Simulating true material behavior
Trying to gain a better understanding of physical phenomena
Modern analysis software makes it possible to obtain solutions to nonlinear problems. However, experienced skill is required to determine their validity and these analyses can easily be inappropriate. Care should be taken to specify appropriate model and solution parameters. Understanding the problem, the role played by these parameters and a planned and logical approach will do much to ensure a successful solution.
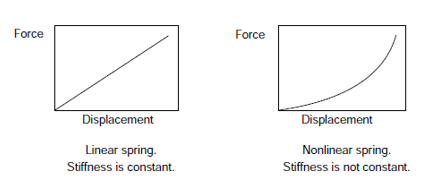
Generally, linear analysis means that the relationship between the applied force and the response to this force (Ex: displacement) is linear in nature. We know that this displacement can be obtained by inverting the stiffness matrix and then multiplying it with the force vectors. In other words, this means that the stiffness matrix does not change during a linear analysis.
This can be further emphasized by taking the example of spring with linear and nonlinear characteristics.
As the stiffness is dependent on the displacement, which keeps changing, the initial stiffness matrix cannot be used without continually updating and inverting it during the course of the analysis. This is the reason why nonlinear analysis takes more time to solve compared to linear FEM analysis.